
1.团队简介
推动从精准感知到自主决策再到智能操控的全链条发展。

张景瑞教授与团队研究生合照

团队成员参加国际学术交流活动
2.团队核心成员
团队负责人

张景瑞
北京理工大学教授、博导,国际宇航科学院通讯院士、国家杰青,“空间技术与社会发展”北京市国际科技合作基地主任。多次入围全球前2%顶尖科学家榜单(World’s Top 2% Scientists)航空航天领域“终身科学影响力排行榜”,担任宇航领域著名期刊Acta Astronautica和Aerospace客座主编、Space: Science & Technology(Science Partner Journal)编委、宇航学报青年编委及国际期刊JSASS和IJALS的编委,多次在“女性与太空”国际研讨会上做特邀报告。主要围绕空间探测技术、航天器制导导航与控制技术,在轨服务和空间碎片关键问题开展研究,出版专著 4 部均入选国家级出版工程,主编工信部十四五规划教材1部、校级十四五规划教材1部;获军队科技进步二等奖1项;并先后获得北京市科技新星计划、北京市优秀人才培养资助计划支持,获评北京青年科技奖、全国优秀科技工作者、北京理工大学教书育人奖。
中心学生规模:在站博士后、在读博士和硕士研究生40余名。
3.团队研究方向
[太空态势智能感知]
太空态势智能感知方向聚焦复杂空间环境下对非合作航天器的持续追踪、行为理解与未来态势预测,旨在构建面向高动态、多目标、强不确定性的智能认知体系。研究内容包括短弧稀疏观测条件下的稳健目标追踪、多源异构信息融合的机动检测与行为意图识别、以及结合动力学先验与智能推理的威胁评估与态势演化预测,形成从“观测–认知–预测”一体化的智能态势感知框架,实现对太空目标的精准追踪、可靠理解和前瞻性态势掌控,为太空交通管理与空间资源可持续发展提供核心技术支撑。
[飞行器群体博弈与决策智能]
飞行器群体博弈与决策智能方向以复杂环境中的多智能体及其行为为研究对象,探索具备自主推理与实时博弈能力的群体智能决策机制。研究通过构建符合物理约束的多主体博弈模型,引入时空情景感知、策略推演与分布式协同学习等方法,使飞行器能够在高度动态与不确定的环境中形成稳定、可靠且具备适应性的集体行动。该方向旨在支撑编队维持、交会对接、协同观测与空间交通调度等多类型任务,为未来面向全球业务的智能星群体系提供更高水平的自主运行能力与安全韧性。
[高复杂航天系统操控智能]
高复杂航天系统操控智能方向关注航天任务中高敏捷、多自由度、状态剧烈变化的复杂系统,包括寿命末期离轨载荷、行星表面机器人平台、新一代人形机器人等。研究通过构建多物理耦合条件下的统一操控动力学模型,引入自感知、自诊断与预测补偿等机制,并结合学习驱动的高品质控制策略,使系统能够在非线性扰动、未知环境与任务切换频繁的条件下保持稳定、精准与连续的操控能力。该方向旨在推动航天系统从规则驱动走向自主演化,使未来空间建造、在轨维修、月面探测与空间碎片清除等任务具备更高水平的灵活性、安全性与长期运行能力。
4.团队研究成果
团队承担了国家重点研发计划、国家自然科学基金重点基金、国防科工局空间碎片专项、国防科工局民用航天项目、173项目等多项国家重大重点课题,获军队科技进步二等奖1项,中国专利奖优秀奖1项,已承担国际合作项目14项,在JGCD、IEEE TAES、AA等国际顶级期刊发表论文100余篇,获授权国家发明专利50余项。相关研究服务于我国空间碎片治理,在轨服务,轨道优化设计与控制等航天背景型号任务。
代表性工作介绍
太空交通智能管理系统
开发了面向复杂轨道环境的太空交通智能管理系统,构建了融合多源观测、机动识别与不确定性建模的碰撞预警技术体系,并同步开发了太空交通数字孪生系统,实现对在轨卫星状态、交互行为与风险态势的实时映射与演化推演。该系统显著提升了高密度轨道环境下的风险识别与预警能力,相关成果已应用于国家气象局风云气象卫星的碰撞风险评估与商业航天多颗在轨卫星的避撞预警服务,为我国太空交通管理与在轨安全运行提供了重要技术支撑。
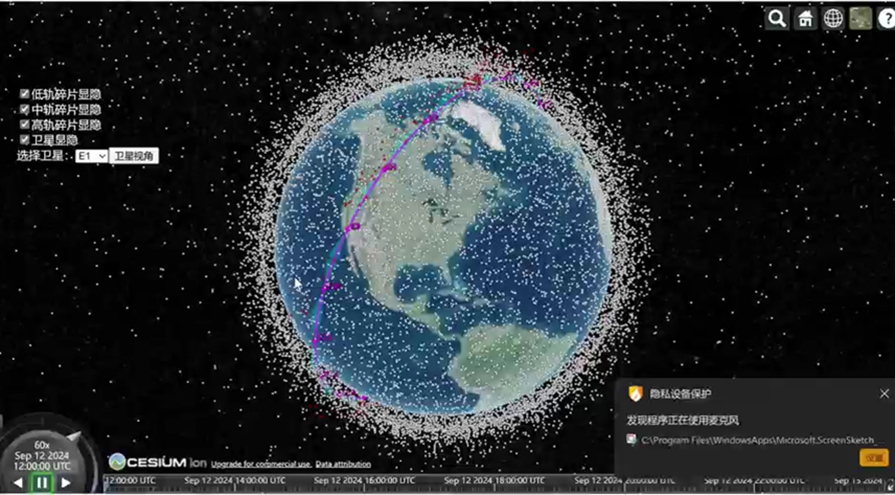
太空交通数字孪生系统
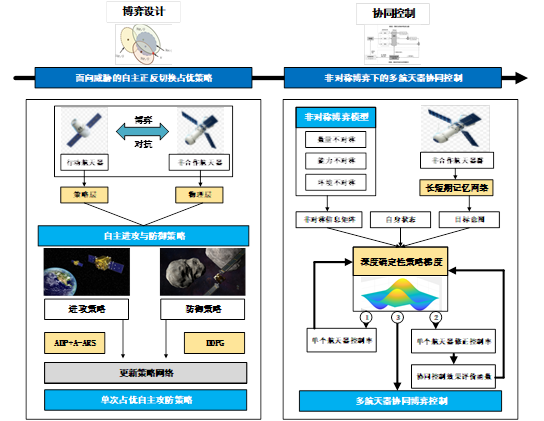
面向多航天器协同任务的群体博弈决策系统
构建了一套面向多航天器协同任务的群体博弈决策系统,通过轨道态势感知与智能策略生成实现航天器在复杂空间环境中的自主协同。系统能够获取轨道位置、相对运动与任务约束等关键态势信息,并基于多主体博弈模型与强化学习算法生成安全、稳定且高效的协同行为策略。进一步将各航天器的状态与策略信息共享至中心节点或分布式决策体,实现编队维持、协同观测与碰撞规避等任务的智能化调度,能够显著提升星群运行效率与空间安全韧性,助力未来智能化星座体系的构建。
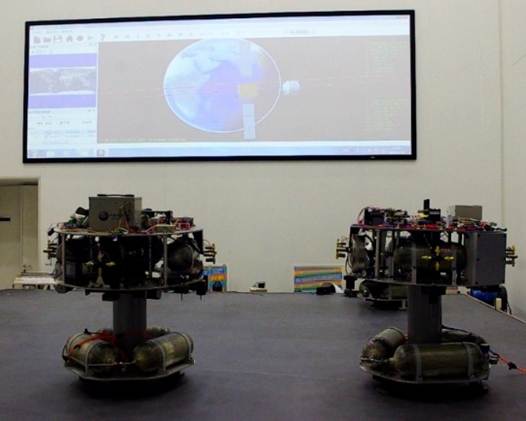
博弈协同关键技术及其演示验证
增阻式离轨系统“清寰”成功搭载发射
团队自主设计并研制了目前国际上球体直径最大的增阻式在轨离轨装置“清寰”,该装置已于2025年9月5日随运载火箭成功发射入轨,受到多家知名媒体的关注和报道。“清寰”采用大尺度球形充气体作为气动增阻结构,可在无需额外推进剂的条件下显著加速寿命末期航天器的轨道衰减。围绕该装置,团队构建了从地面验证、在轨展开到衰减效能评估的完整技术链条,其中包括折叠与柔顺充气展开技术、复杂空间环境下装置稳定与防护技术,以及离轨过程安全评估技术。实现了增阻离轨方案从概念设计到工程化应用的全面贯通,为国家未来的空间环境治理提供了可复制、可推广的技术路径。
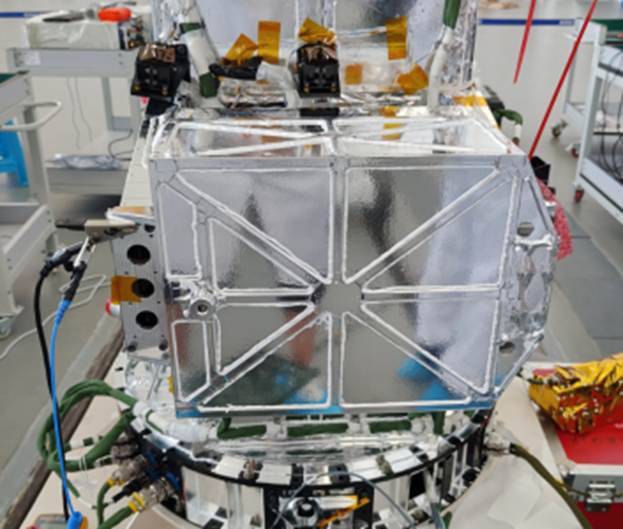

“清寰”增阻离轨装置
5.团队文化与资源
课题组氛围
团队坚持鼓励成员在跨学科交叉中探索前沿问题,形成学术讨论充分、工程结合紧密的良好科研生态。
优势资源
托单位在空间态势感知、轨道动力学与智能感知等方向具有扎实积累,拥有自主建设的空间目标观测与仿真平台、太空交通数字孪生系统、多源数据处理集群与高性能计算环境,并与航天院所及多家商业航天企业保持长期合作,科研条件优越、工程应用场景丰富。
招生要求
欢迎具有航天工程、控制工程、人工智能、计算机、数学、力学、信息与通信工程等相关背景的学生加入;希望学生具备良好的编程能力(Matlab/Python)、数据分析基础、对空间技术与智能算法感兴趣,以及踏实进取的科研态度。
6.课题组联系方式
课题组热烈欢迎对航天器智能感知、博弈与操控等领域充满热情的博士后、研究生和本科生(欢迎大二、大三同学申请科研实习)加入!欢迎联系:zhangjingrui@bit.edu.cn